|
 |
|
  |
|
|
|
|
|
|
|
|
|
|
|
 |
 |
|
|
|
|
|

 |
|
Skeletonization is a well-known problem in the computer graphics and visualization research community. In this project, we develop skeleton-growing algorithm which can extract a curve-skeleton from a 3D object automatically. It produces a single reliable result without threshold adjustment step. The resulting curve-skeleton could be used in many different applications including visualization, shape recognition and computer animation. |
 |
|
GENTORO is a system for supporting children's storytelling using robots and handheld projectors. A mobile mixed-reality environment created by GENTORO enhances the level of children's motivation, engagement, and embodied participation in their storytelling activity and nurtures their creativity and imagination. |
 |
|
In the CoGAME project, we have been developing a system that allows users to manipulate robots using mobile projectors. Through this project, we investigate novel and intuitive interaction techniques using a mobile device that embeds a camera and a projector. |
Shepherd: A Mobile Interface for Multi-robot Controls from a User's Viewpoint
 |
|
We propose a remote control technique for multi-robots that allows a user to control them from his viewpoint. By capturing an image of robots with a camera mounted on a mobile phone and moving it in a three dimensional space, a user can intuitively control the robots as he would intend. |
 |
|
SketchMap is a system that integrates face-to-face and distributed collaboration of primary school children. We use small-scale tablet PCs for the distributed field work and an additional normal PC with data projector for the face-to-face situation. Children use SketchMap for creating their "personal environment"map of an area around their school - a task habitually tackled when being introduced for the first time to the basic concepts of cartography. While SketchMap so far focuses on the mentioned task, the system itself will in the future be extended and adapted to other related scenarios such as instruction in traffic behavior or, important!, civil protection and children security measures. |
 |
|
A system called T-RHYTHM that supports individual learners playing or singing in an ensemble is proposed. A learner using T-RHYTHM is not confused by other learners' performances, because he/she is given his/her own rhythm through tactile feedback. A rhythm of each learner is extracted based on a performance by an accompanist and transmitted to his/her tactile device via a wireless communication. |
 |
|
We have developed near future technologies in this project: a mobile device with a projector and intuitive manipulation techniques by using a video camera mounted on the device. The proposed system called Hotaru (a firefly, in English) allows users to annotate, rotate or transfer files between multiple devices by touching their projected displays with fingers. |
 |
|
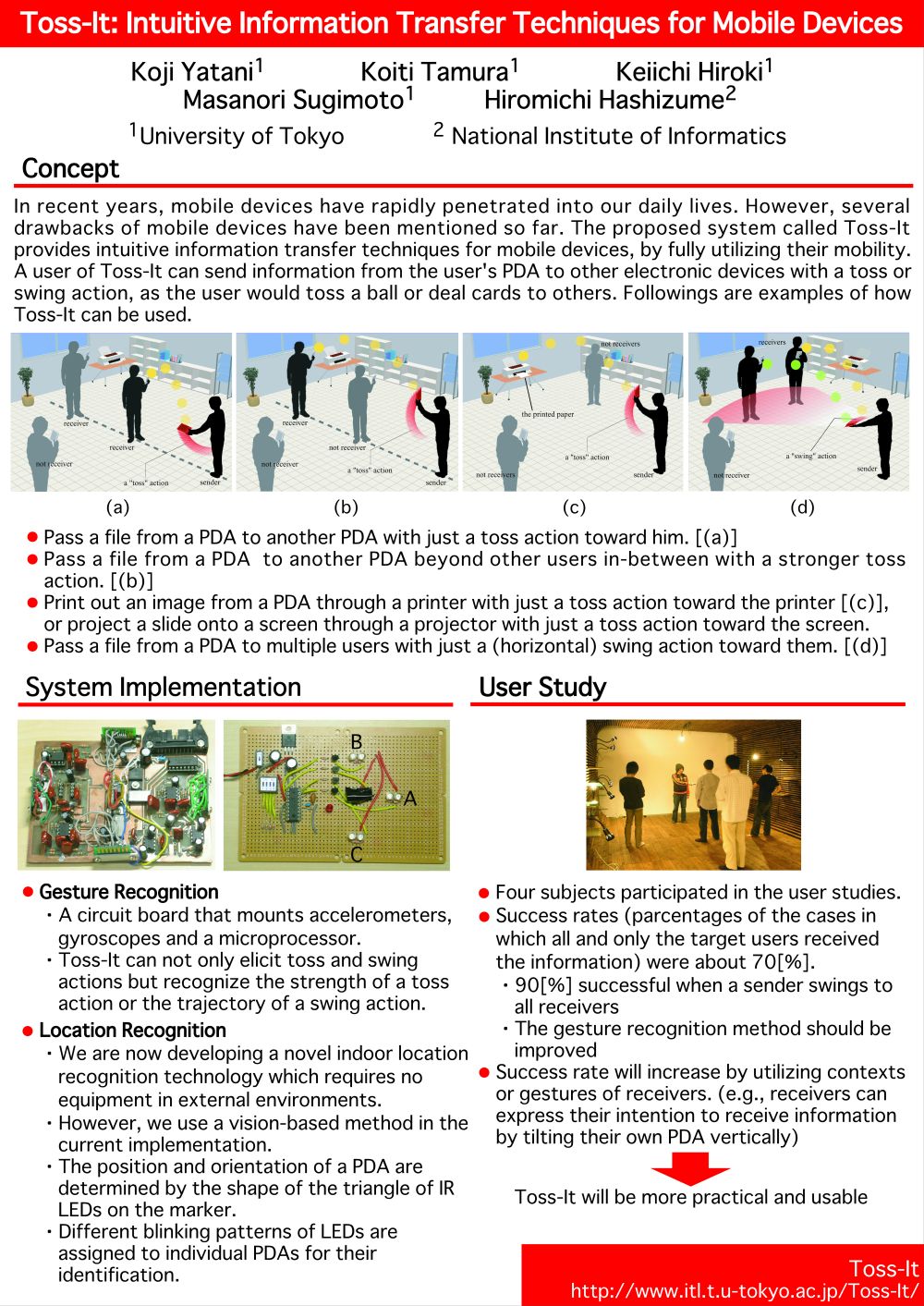
Toss-It provides intuitive information transfer techniques for mobile devices, by fully utilizing their mobility. With Toss-It, a user can send information from the user's PDA to other electronic devices with a "toss" or "swing" action, as the user would toss a ball or deals cards to others. |
A Cooperative Navigation Technique for Multiple Flying Robots
 |
|
We have been investigating an automatic navigation technique for multiple indoor flying robots. By integrating the position information of multiple robots gained through a sensor mounted on each of them, the robots can cooperatively fly a designated route in a room. |
An Efficient Manipulation Method for Mobile Devices by Using Their Front and Back Sides
 |
|
In the proposed system, a touchpad is attached to a backside a mobile device. The combination of frontside and backside input allows users to conduct several manipulations (zooming, scrolling etc.) easily and efficiently. |
A Flying Robot That Interact with Humans
 |
|
Many kinds of robots are expected to play active roles in our future society. To this end, it is important for the robots to interact with us efficiently. We have been developing fundamental technologies and theoretical frameworks for efficient interactions between humans and flying robots. |
CityVoyager
 |
|
CityVoyager is a shop recommendation system for city dwellers, designed to run on mobile devices. The system automatically estimates users' preferences and needs from the history of their past location data acquired using GPS, and presents a tailored list of recommended shops. |
|
|
 |
|
|