 |
 |
|
  |
|
|
|
|
|
|
|
|
|
|
|
 |
 |
|
|
|
|
|

(NEW)Indoor Positioning using Mirror-image Speakers
 |
|
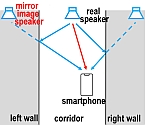
Serious problems for deploying indoor positioning systems are related to issues including laborious and monetary costs. To solve the problems, we introduce the concept called "mirror-image speaker". We assume that acoustic signals reflected by walls or floors are emitted from virtual speakers of their real speaker at its mirror-image positions.
By conducting multi-lateration using direct and reflected signals, it is possible to accurately and precisely find a position of a target (e.g. smartphone). The proposed method will be implemented in a navigation system to be deployed at corridors in an office building where the number of available speakers is small and multiple reflective signals are receivable.
|
(NEW)Visible Light Positioning using Reflected Indoor Luminaries
 |
|
Many visible light positioning (VLP) systems assume that a receiver (e.g. smartphone camera) can capture direct signals from multiple illumination devices, which does not always hold in real situations. In this project we propose a system receiving optical signals emitted from multiple indoor luminaries and reflected by a floor. By capturing an image of a floor using a smartphone camera and identifying intensities of reflected lights emitted from different luminaries, accurate and realtime tracking of a smartphone is confirmed to be achieved.
|
Rapid and Accurate Time Synchronization using LED and General Purpose Video Camera
 |
|
LED illuminations are showing signs of wider acceptance in our society.
By using a general purpouse video camera, such as a smartphone built-in camera,
we propose a rapid and accurate timesynchronization technique.
Optimally modulated illumination as a function of camera exposure time is investigated through theoretical analyses and
its mathematical representation is derived. Experiments in real environments with a single LED and 60 fps camera show that the
proposed technique can achieve time synchronization to within a 26.3 μ s error at the 90th percentile using only four frames
(a measurement time of 0.067 s). Comparative experiments with computer simulations prove that the proposed technique
using optimally modulated illumination to camera exposure time needs less CPU time than that using nonoptimally modulated
illumination. Applications utilizing features of the proposed technique, such as high-speed visible light communication (VLC), illegal photography detection, indoor localizaion, multi-camera synchronization for motion capture are being implemented.
|
Rapid and Selective Visible Light Communication using Rolling-shutter Camera
 |
|
We developed a flicker-free and high-speed visible light communication (VLC) system by using optimally modulated signals emitted from illumination devices.
The proposed system achieved 75 kbps at maximum through experiments using a commercially-available camera (60 fps, 1080 line sensors), which goes beyond the theoretical upper limit of existing VLC systems implementing the on-off keying modulation.
We clarified the performance of VLC systems using OFDM modulated multicarrier signals through theoretical analyses. Based on them, we devised a system for selective communication between multiple cameras whose exposure time ratios are mutually different.
|
Indoor 3D Localization Technique for Smartphones
 |
|
For rapid indoor 3D localization of smartphones,
a new method called Frequency Division Multiplexing Phase Accordance Method (FDM-PAM)
is proposed. The method uses a beat called a sync pattern composed of a pair of sinusoidal
waves whose frequencies are slightly different, which is the same way as our
original ultrasound ranging technique called the
Phase Accordance Method (PAM).
By generating multiple sync patterns whose central frequencies are different and transmitting
each of them from different speakers, FDM-PAM conducts time-difference-of-arrival (TDOA) multilateration.
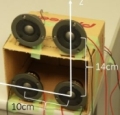
In the current implementation of FDM-PAM, four sync patterns are generated by using two out of eight sinusoidal
waves whose frequencies range from 14.75 kHz to 18.25 kHz (frequency interval: 500 Hz).
Through experiments using four speakers in short baseline intervals (10-14 cm), it is confirmed that FDM-PAM achieves accuracy range around 10 to 30 centimeters using only a transmission of a short burst (4 ms), which indicates a sufficiently rapid indoor localization technique for smartphones.
|
Rapid Optical Ranging Technique
 |
|
The proposed optical ranging technique called LT-PAM (Long-Term Phase Accordance Method) transmits multiple sync patterns composed of two sinusoidal waves with different frequencies. Unlike chirp modulation techniques, LT-PAM transmits the two waves simultaneously and thus enables the shortening of measurement time. We have conducted experiments using two types of light sources, collimated and diffused light.
The experimental results indicated that the proposed method showed a moderate level of accuracy by adjusting the measurement time.
|
Compact 3D Tracking System
 |
|
We propose a novel technique for 3D localization that integrates a single camera and ultrasound. We use the Extended Phase Accordance Method and the ultrasound to measure accurately the distance to a moving target and we use the camera to identify the target’s 2D position on the image plane. A prototype system consists of a transmitter unit mounting one ultrasound transmitter and three infrared LEDs around it, and a receiver unit with one inexpensive camera and one ultrasound receiver. |
Ultrasound Motion Capture System
 |
|
We propose an innovative motion capture system using ultrasonic communications. Compared with existing commercial motion-capture systems that use optical or magnetic sensing, the proposed system can provide a cost effective solution for industrial and entertainment applications. To improve the capture rate of the proposed system, the EPAM algorithm was implemented in a field-programmable gate array (FPGA). |
 |
|
We have been developing an innovative relative positioning technique by using ultrasonic sensors, in order to accurately and rapidly identify distances and orientations among multiple people and electronic devices in an indoor environment. |
|
|
 |
|
|