 |
|
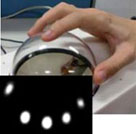
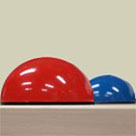
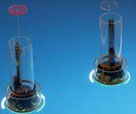
HATs are active tangibles with 4 degrees of freedom that are capable of moving, rotating, and changing height. By adding height as an additional dimension for manipulation and representation, HATs offer more freedom to users than ordinary tangibles. HATs support bidirectional interaction, enabling them to reflect changes in the digital model via active visual feedback and to assist users via haptic feedback. |