 |
|
|
Research
Ultrasonic-based Localization
The ITL ultrasound positioning system tracks precisely the real-time location
of devices or people in indoor environments. The basic idea of the system is
that it uses the propagation delay of ultrasonic signal between transmitter
and receiver to calculate the distance between them. Several techniques are
implemented to achieve very high accuracy, including our innovation technique
called Phase Accordance Method.
A demonstration video is available for download
here.
Implementation
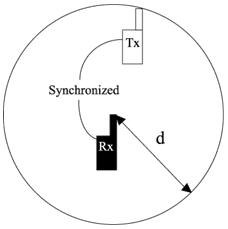
We use the combination of Time of Arrive (TOA) and Angle of Arrival (AOA) methods.
In TOA method, the transmitter and receiver are synchronized using a common
timing reference. The transmitter sends a message with timestamp. Then the
receiver receives the message, compares with the local clock and the time
different can be calculated.
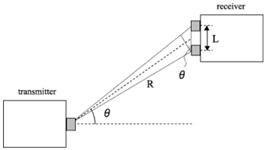
AOA is a technique which is used to determine the direction of the incoming
signal. In order to implement AOA method, two ultrasonic microphones are
needed at the receiver. These two microphones are attached to the receiver
board in parallel, separately at a certain length. The signal reaches each
microphone at different moment.
 |
|
 |
| Time of Arrival |
|
Angle of Arrival |
The figure on the right shows the implementation of AoA method. With known
value L and the distances to two microphones, using simple trigonometric rule,
the angle of the incoming signal can be calculated.
Phase Accordance Method
|
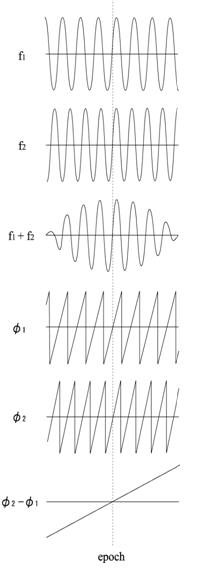
We have proposed an innovation method for rapidly detecting the incoming signal.
In this method, we use an ultrasonic burst signal. Unlike the conventional
burst pulse detection system which uses the envelope of the burst to indicate
the start of package, instead our technique uses the burst which consists of
two or more frequency sub-carriers and the carriers' phases accord at a single
time marker called epoch.
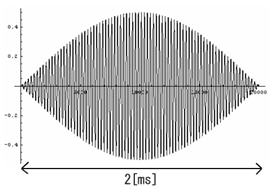
The superposition of the two frequency signals make a beat which shows a
distinctive pattern on the envelope. We call the result waveform as the sync
pattern.
Sync Pattern
The advantage of this method is the short detection time of the incoming signal.
It only requires a burst of two milliseconds which in turn significantly limits
the error occurred from the time used in detecting process.
|
|
Another benefit of this method is that the sync pattern synchronizes the
receiver's local oscillator to the carrier's phase. Therefore, we can simply
communicate data using phase shift keying or phase amplitude modulation.
System Overview
We design a simple system to demonstrate the performance of the proposed
technique. The system consists of:
- Ultrasonic Transmitter Board
- Ultrasonic Receiver Board
- Signal Processing Board
These components are connected as shown in the figure below:
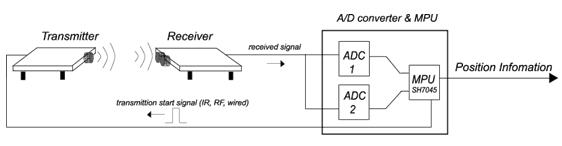
System Design
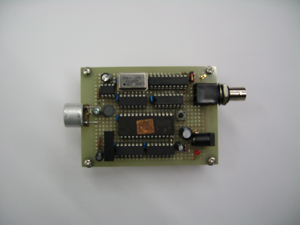
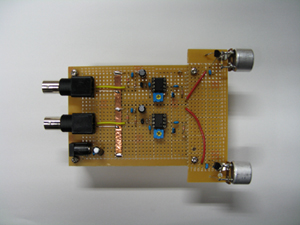
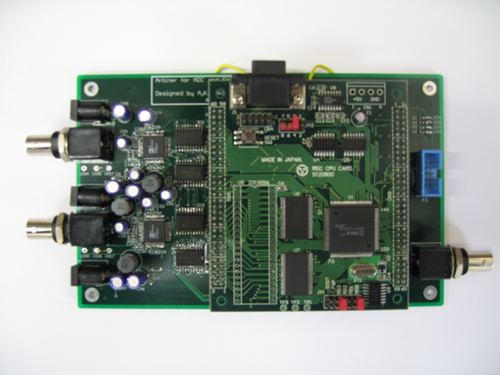
Here are some pictures of the hardware:
 |
 |
 |
| Transmitter Board |
Receiver Board |
Signal Processing Board |
Experiment and Rusult
|
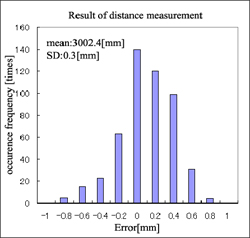
We have conducted the experiment at the range of three meters. First we
observe the distance measurement. The experiment was repeated for 500 times
to get the average value and the result is very satisfying.
- Mean value is 3002.4 mm
- Standard Deviation is 0.3 mm
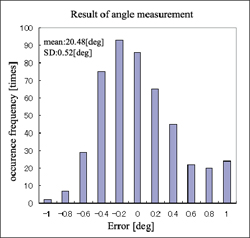
Then we also investigate on the angle measurement. We placed the device at
the actual angle of 20 degree and again, the experiment was repeated for 500
times.
- Mean value is 20.48 degrees
- Standard deviation is 0.52 degree
|

|
The graph of the results are shown below:
| |
|
| Result from distance measurement |
|
Result from angle measurement |
|
|
|
|
| Wireless Localization Group (2005-2007), Interaction Technology Laboratory
|